SHOPPING CART
- No products in the cart.
-
-
-
specifications: [[item.skuinfo]]
[[item.Product_num]] * [[item.currency]][[item.price]]
[[item.currency]][[item.allPrice]]
-
-
Price
[[listData.currency]][[listData.discount_price]]
[[listData.currency]][[listData.price]]
save [[parseInt((1-listData.discount)*100) ]]%
[[listData.product_sku.sku_code.show_name]]
more
retract
Please select
[[listData.product_sku.sku_code_add.show_name]]
[[listData.product_sku.sku_code_add.show_name]]
ADD TO CART
BUY NOW
ADD TO
CART
BUY NOW
TRUSTED STORE
This store has earned the following certifications.
- Certified Secure Certified
- 100% Issue-Free Certified
- Verified Business Certified
- Data Protection Certified
Unlock Exclusive Deals Now!
Limited-time special prices shop your favorites before they're gone! Click below to start saving!
Go to
see
[[num_page_4]]
-32%
-32%
Sipeed MaixSense A010 3D Depth Camera Module for ROS Users
Price
$
36.99
$25.15
Please select
[[pageData.product_sku.sku_code_add.show_name]]
ADD TO CART
ADD TO CART
Add to wishlist
Category: waypondev fpga

About this item
- [TOF 3D Sensor] MaixSense-A010 is a 3D sensor module composed of BL702 + Juyou100x100 TOF.The LCD screen with 240 × 135 pixels can preview the depth map after colorMap in real time.
- [High-precision] MaixSense-A010 Vision Camera Sensor supports detection of abortion, which can achieve real-time high-precision, high-resolution monitoring traffic movement, and quickly count data data
- [Powerful compatibility] MaixSense-A010 Sensor has powerful compatibility, which can be connected to the K210 MAIX BIT development board based on the serial protocol, such as: AIOT development board or Raspberry Pi LINUX development board for secondary development
- [Support secondary development] A010 MCU ROS camera scanner supports running ROS. In the applicable Linux system environment, access ROS1/ROS2
- [Automatic color adjustment] Support real -time observation of the depth difference between the far and nearly objects, so as to display the cold and cold color tone due to the distance and near







YOU MAY ALSO LIKE

-
-
-39%
-
BPI-F3 8-Core RISC-V SBC with AI Performance - 2X GbE Ethernet for AI Edge Computing, NAS, and Laptop Alternatives
- waypondev fpga
- $99.00 $60.39

-
-
-33%
-
Sipeed Tang Primer 25K GW5A FPGA Development Board for FPGA Education
- waypondev fpga
- $42.99 $28.80
-
-
-30%
-
Sipeed Tang Nano 20K FPGA Single Board Computer for RISCV Linux Retro Gaming, Supports NES Emulation
- waypondev fpga
- $48.99 $34.29

-
-
-40%
-
Firefly ROC-RK3588S-PC 8K AI Single Board Computer for Linux with 4GB RAM and 32GB Storage
- waypondev fpga
- $143.99 $86.39

-
-
-32%
-
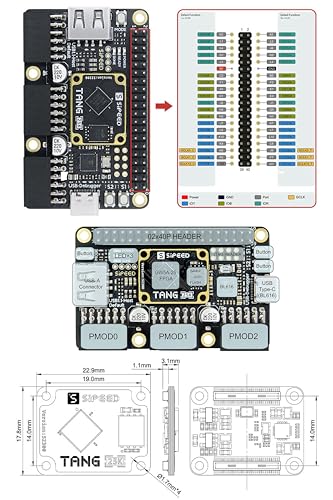
Open Source RISC-V Development Board with Standard PMOD Connector for Hobbyists
- waypondev fpga
- $32.99 $22.43


-
-
-21%
-
RISC-V Single Board Computer with Multiple Camera Inputs (Metal Case)
- waypondev fpga
- $15.99 $12.63



